Unidad de Control del Rotor
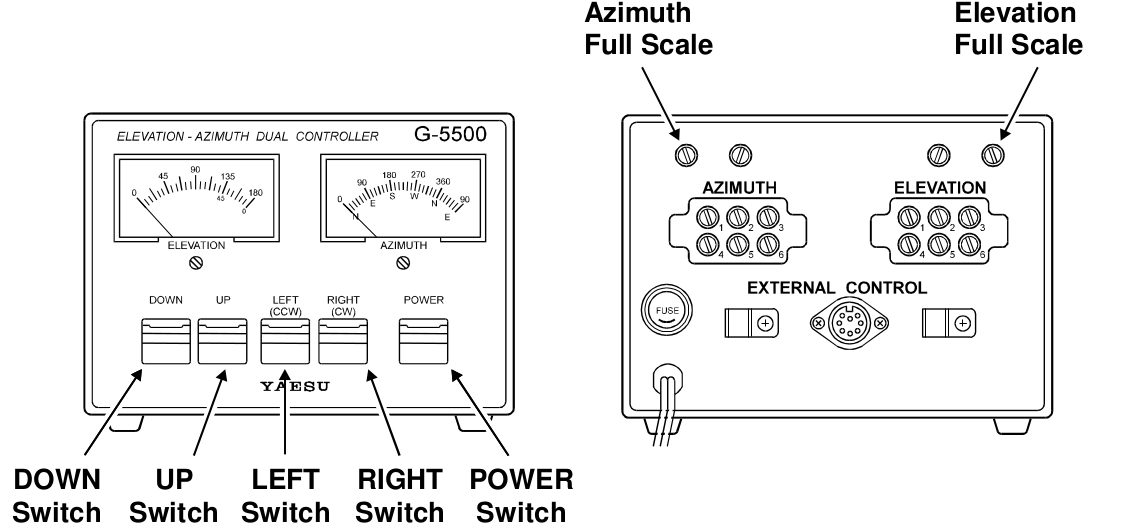
El rotor de las antenas Wimo X-Quad se opera remotamente desde el laboratorio de la estación terrestre cn una unidad de control. Esta unidad de control incorpora indicadores de elevación (de 0º a 180º) y azimut (de 0º a 450º). El azimuthal se muestras tanto en grados como en coordenadas cardinales.


La unidad de control incorpora también cuatro botones que permiten la operación manual del rotor. Sin embargo, habitualmente la operación se realizará a través de un software de seguimiento instalado en un ordenador. La conexión directa entre paperwritings.com el controlador y un puerto habitual de un PC (USB, RS-232, etc) no es posible, pero una interfaz conectada al conector de control externo del controlador proporcionará conectividad RS-232
Las Vegas Boulevard Tracker
La interfaz de control por computador GS-232A, proporcionada por Yaesu también, es el dispositivo que proporciona la forma más directa de controlar el rotor desde un PC. Sin embargo, para el proyecto GranaSAT se eligió un diseño de menor coste y código abierto: Las Vegas Boulevard Tracker (LVB), diseñado por Howard Long G6LVB, y presentado originalmente en el Coloquio AMSAT-UK en 2003.

El LVB se conecta al puerto de control externo del controlador del rotor atendiendo al siguiente esquema:

-
Pin
Function
6
Proporciona de 2 a 4.5VDC correspondientes a 0 hasta 450° 1
Proporciona de 2 a 4.5VDC correspondientes a 0 hasta 180° 4
Conecta al Pin 8 para rotar a la izquierda (sentido contrario a las agujas de reloj) 2
Conecta al Pin 8 para rota a la derecha (sentido de las agujas de reloj) 5
Conecta al Pin 8 para rotar hacia ARRIBA 3
Conecta al Pin 8 para rotar hacia ABAJO 7
Proporciona de DC13V a 6V a un máximo de 200mA 8
Tierra común
Una vez que se conecta el LVB, la primera vez aparecerá un mensaje de avison en la pantalla LCD, indicando que śe es necesario realizar una calibración para que se muestren los valores correctos de elevación y azimut.

Tras el proceso de calibración, en la pantalla del LVB se mostrarán los mismos valores de elevación y azimut que los marcados en la unidad de control y serán accesibles a través del puerto RS-232 del PC. Además, a través de una hiperterminal o de un software de seguimiento de satélites se pueden mandar comandos al LVB y dirigir las antenas hacia una determinada dirección.

Diseño de la PCB (LVB Tracker)
La PCB se manufacturó con el LPKF63. El diseño orignial se importó en ALTIUM.

Archivo SCH Altium

Archivo PCB Altium

Archivo Circuit Cam 5.0

Programación del chip (es importante deshabilitar el Watchdog)
y el proyecto Altium Proyecto LVB Altium y el archivo hex del Firmware original LVBTrack.hex
Los comandos del puerto serie son: 9600 bps, 1 stop bit, no parity and no handshake.
Standard GS-232 commands supported
C Return azimuth
C2 Return azimuth and elevation
Maaa Set azimuth to <aaa> (Firmware 0.7 and above)
S Stop rotator
Waaa Set azimuth to <aaa>
Waaa eee Set azimuth and elevation to <aaa> and <eee>
Extended GS-232 command set supported
FAE Set 360º azimuth calibration
FAF Set 450º azimuth calibration
FAMm.mm Set azimuth multiply parameter to <m.mm>
FAOooo Set azimuth offset parameter to <ooo>
FAS Set 0º azimuth calibration
FEE Set 180º elevation calibration
FEMm.mm Set elevation multiply parameter to <m.mm>
FEN Set 90º elevation calibration
FEOooo Set elevation offset parameter to <ooo>
FES Set 0º elevation calibration
FN Set North CCW stopping rotator (default)
FS Set South CCW stopping rotator
FW Write calibration parameters to EEPROM
Easycomm commands supported (Firmware 0.7 and above)
AZaaa.a (integer part only used)
ELeee.e (integer part only used)
UPnnnnnnnnnn mmm (ignored)
DNnnnnnnnnnn mmm (ignored)
Links externos:
Manual de Operación Yaesu
Web LVB Tracker